The software, tools and data developed by our lab can be found below.
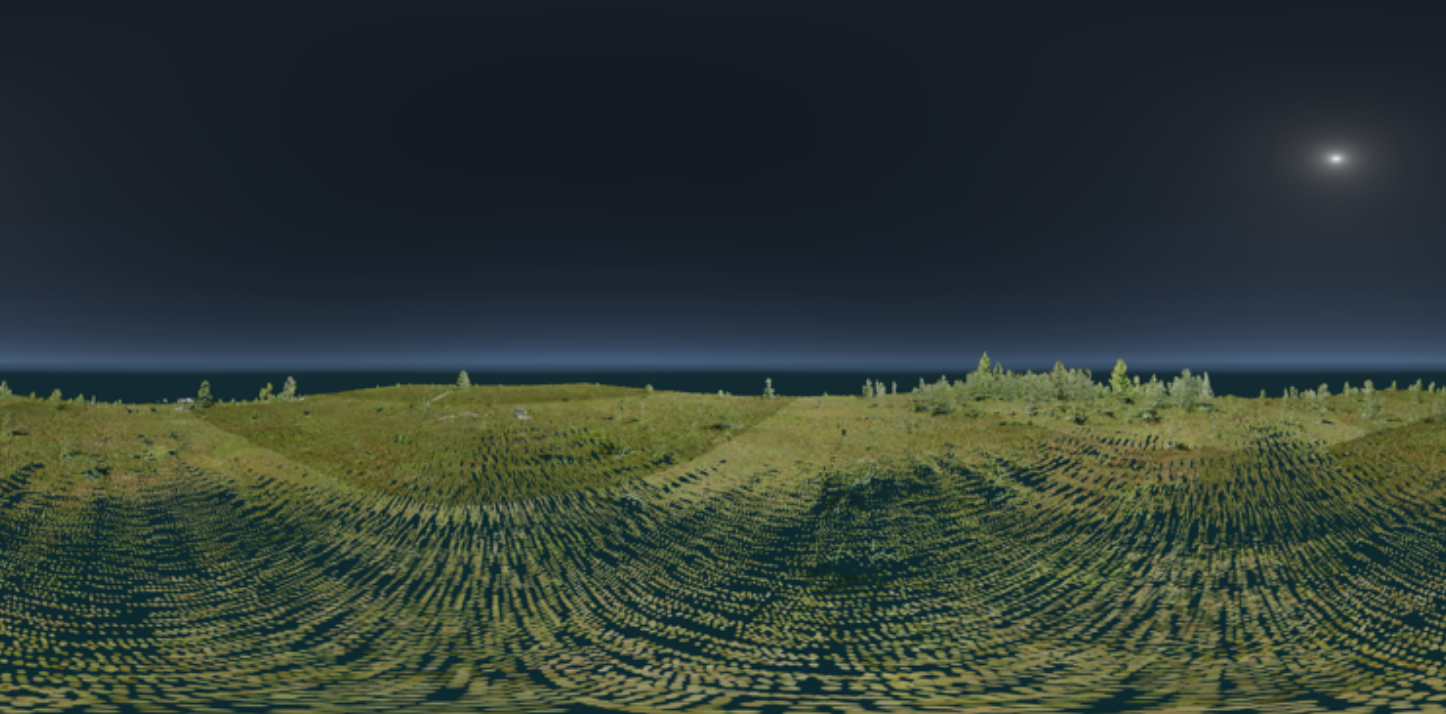
Implementation of the directly-georeferenced hyperspectral point cloud
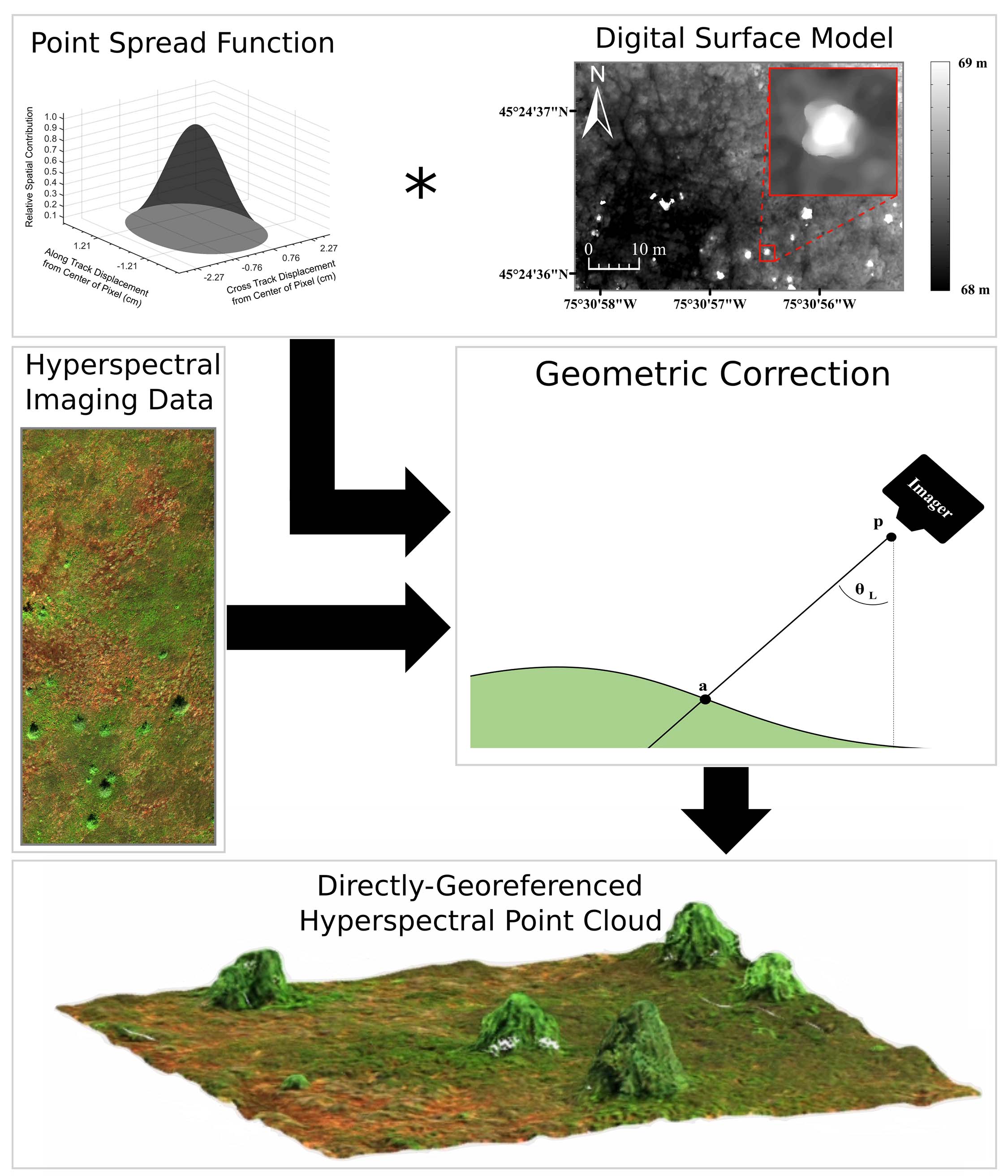
MATLAB code to generate the Directly-Georeferenced Hyperspectral Point Cloud (DHPC) from pushbroom hyperspectral imagery (HSI). See Inamdar et al. 2021a to download. As described by Inamdar et al. 2021b in the application of the methodology, "The DHPC was characterized by zero pixel loss, pixel duplication and pixel shifting. Despite containing additional surface elevation data, the DHPC was up to 13 times smaller in file size than the corresponding rasters."
Watch Deep Inamdar explain the advantages of the DHPC for the distribution, analysis and application of HSI.
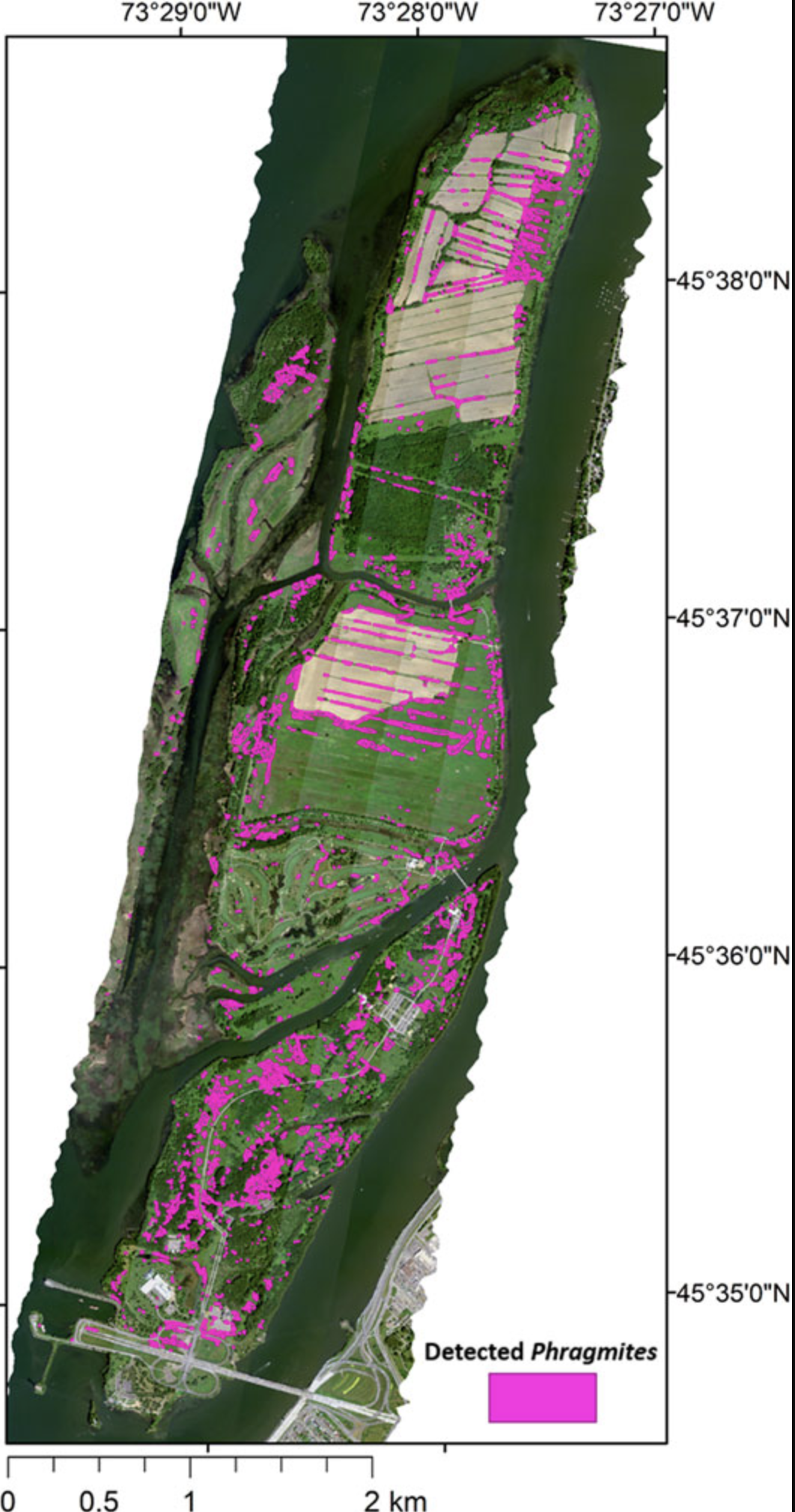
Water column compensation workflow for hyperspectral imaging data
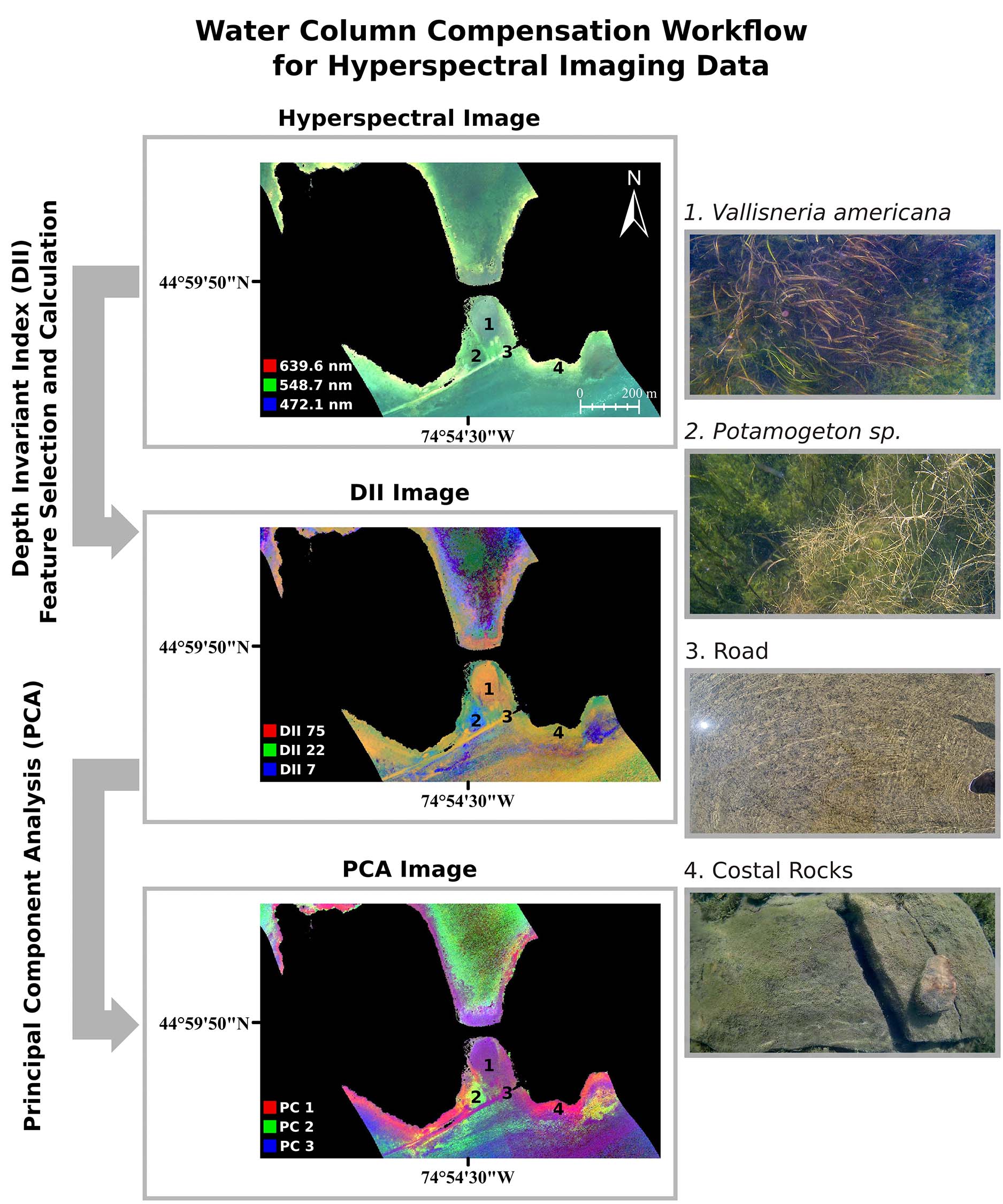
MATLAB workflow for hyperspectral imagery (HSI) to compensate for the water column in shallow, clear to moderate optical water types. See Inamdar et al. 2022 to download. This method was successfully applied by Rowan et al. 2021 with airborne HSI in order to detect and identify submerged aquatic vegetation.
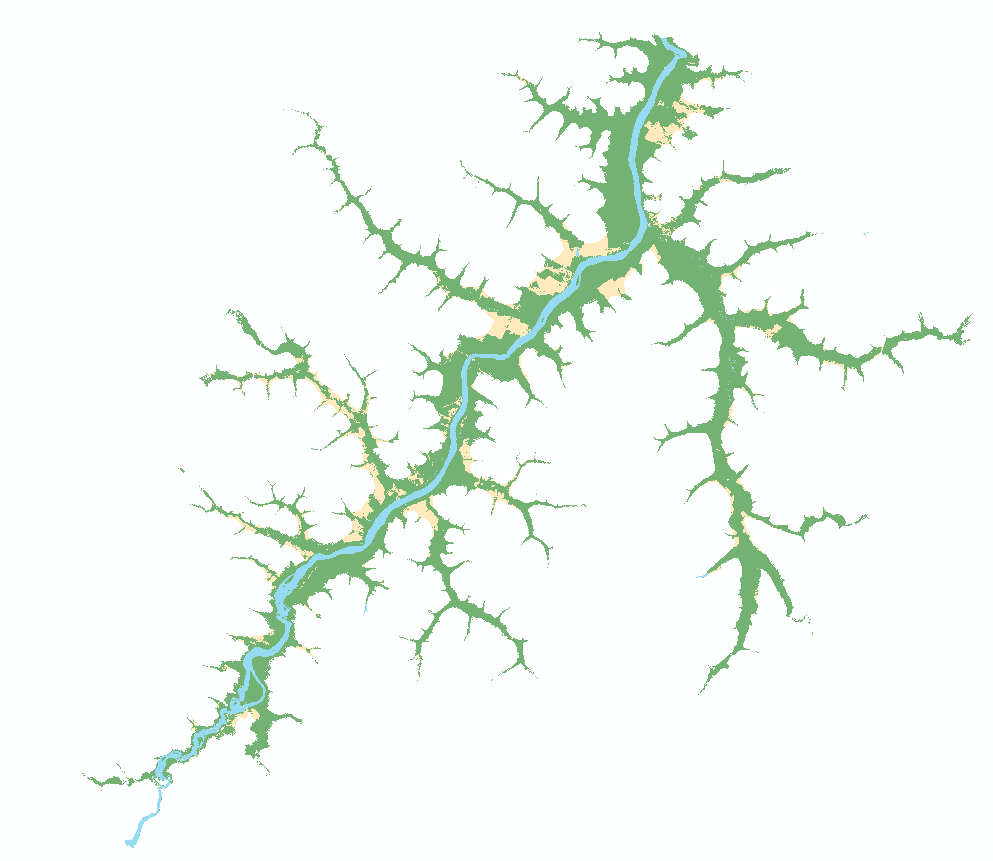
A Python Algorithm for Shortest-Path River Network Distance Calculations Considering River Flow Direction
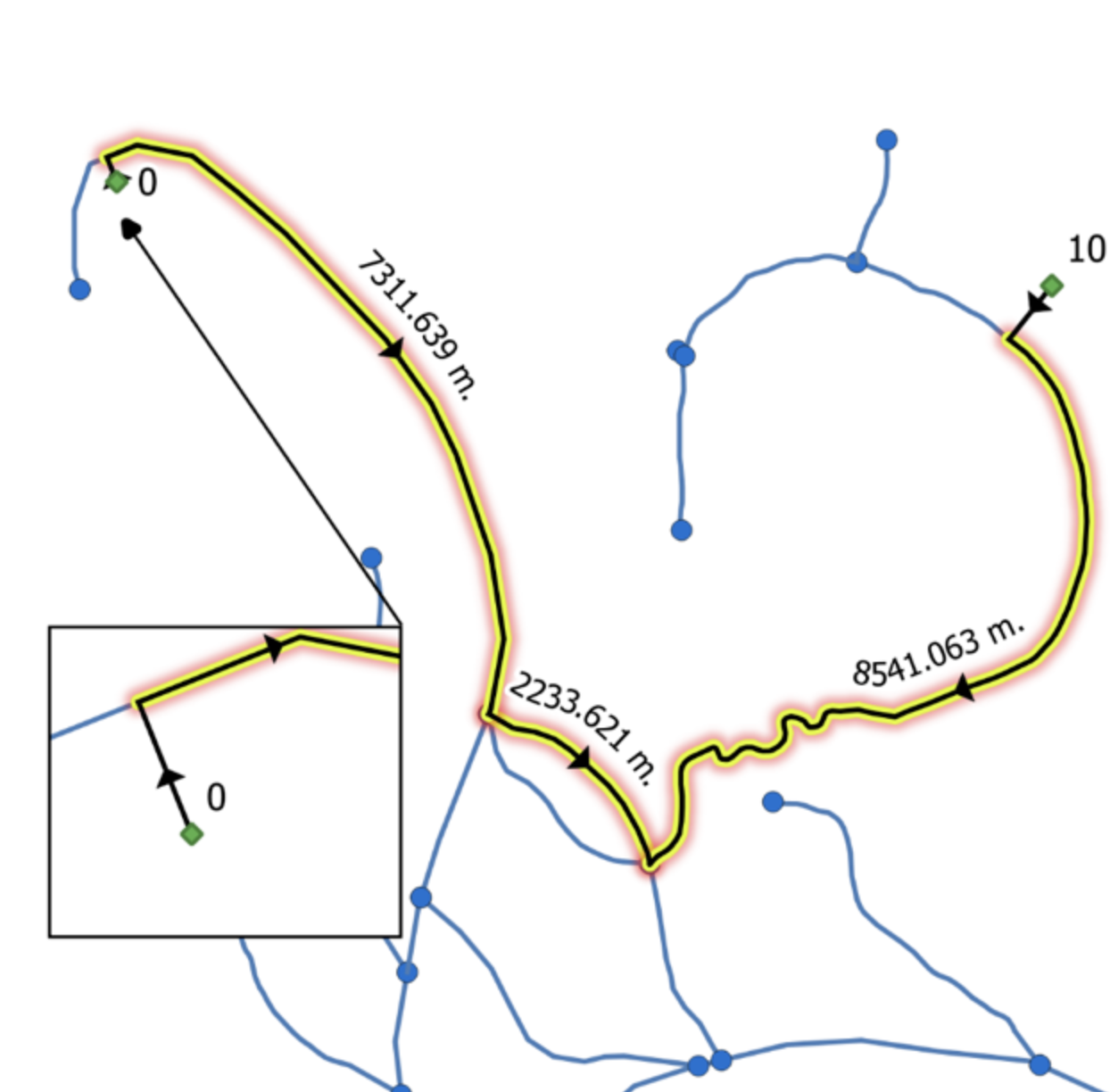
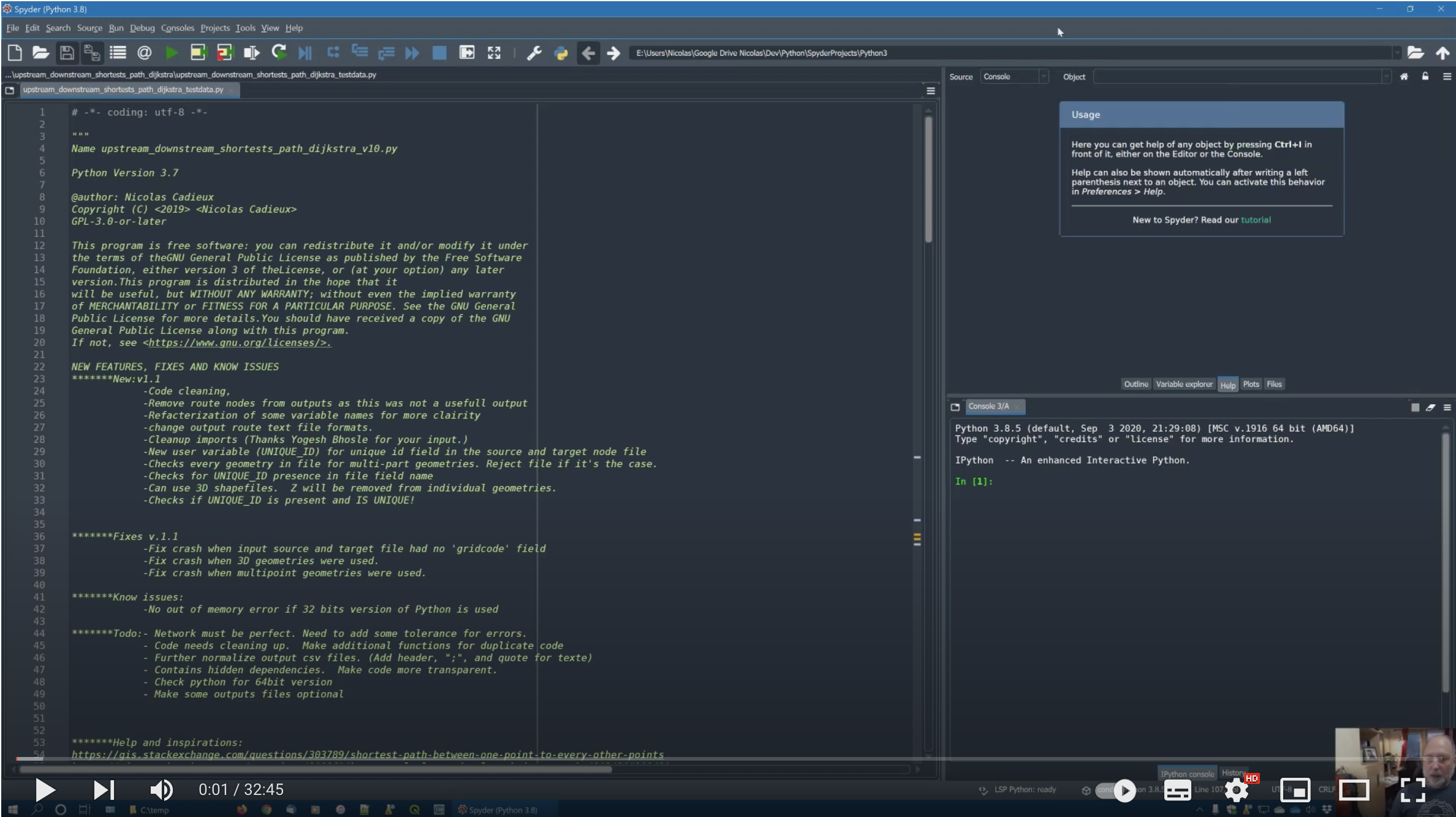
A Python 3.7 program that was specifically developed for river networks. It implements multiple single-source (one to one) weighted Dijkstra shortest path calculations, on a list of provided source and target nodes, and returns the route geometry, the total distance between each source and target node, and the total upstream and downstream distances for each shortest path. See Cadieux et al. 2019 for a detailed description. Click here to download the code. The video below illustrates how to set up and run the code.
Shape2DJI_Pilot_KML.py
This python script will scan a directory, find all the .shp files, reproject to EPSG 4326, create an output directory and make a new .kml for every line or polygon found in the files. These new .kml files are 100% compatible with DJI Pilot on the Smart Controller (e.g. for M300 RTK). The .kml files created by ArcGIS or QGIS are not currently compatible with DJI Pilot. Click here to download from Nicolas Cadieux's GitLab. Watch the video for instructions on how to install and run it (even if Python has not been previously installed).
Fix directional network QGIS Models
Three interdependent models will check for invalid geometries, identify common network errors (disconnected edges, multipart geometries, overlapping geometries, parallel edges, self connecting lines, network vectorizing direction changes...). It provides tools to track changes when fixes are applied to the network file. Read Nicolas Cadieux's blog post for details and download the models from his GitLab. The video below describes the three interdependent models.
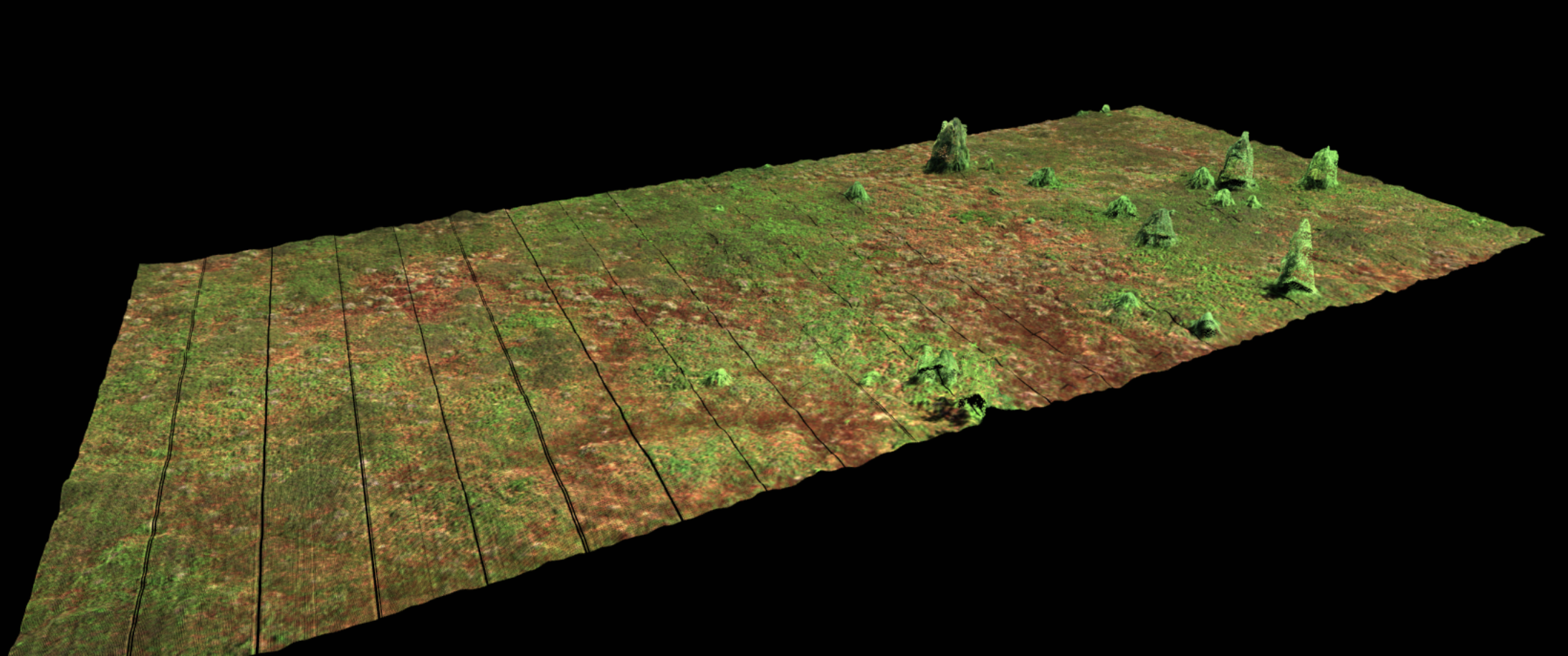
3DCloud-HyperSpectralFusion
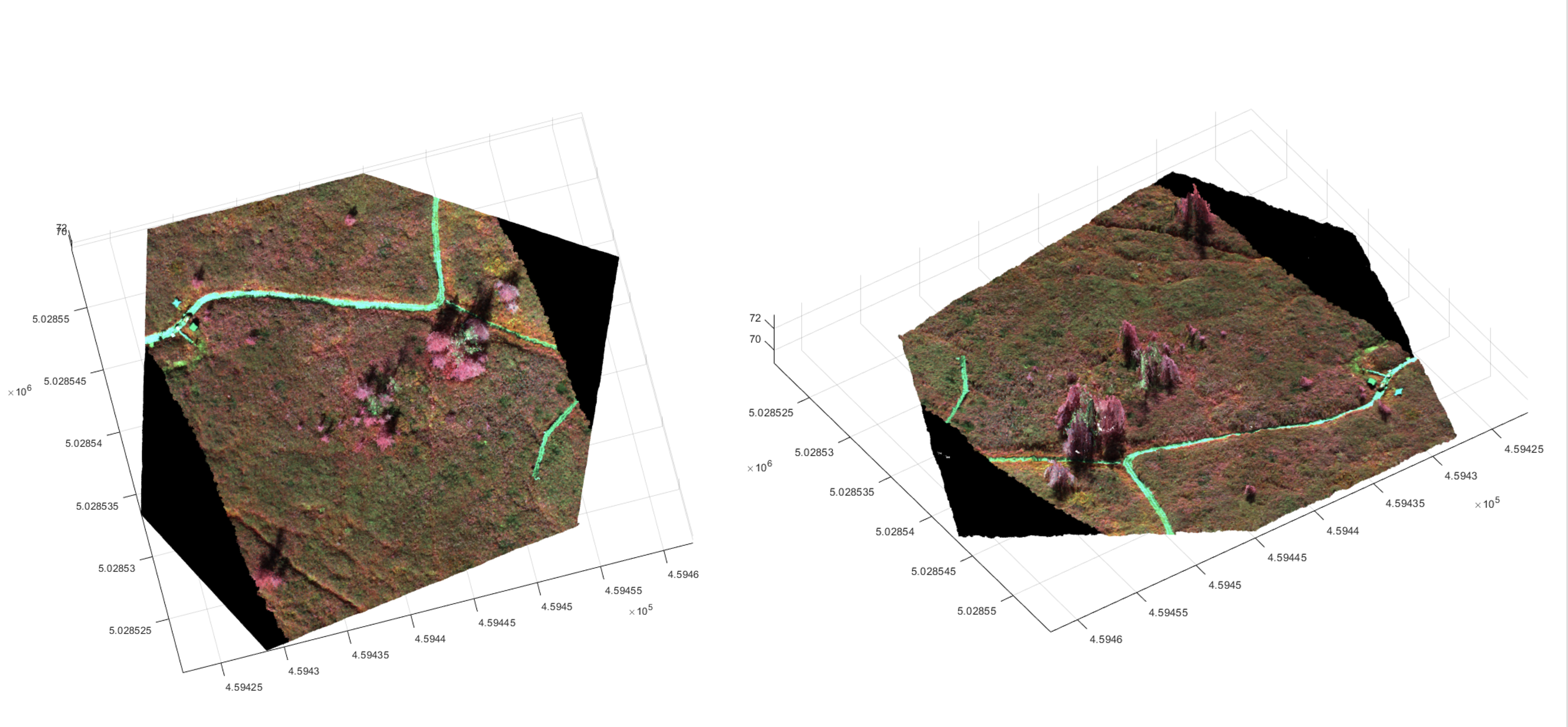
This Python program is used to fuse a 3D point cloud with hyperspectral imagery (HSI). The point cloud can be obtained via LiDAR, Structure-from-Motion photogrammetry or any other source. The raster HSI imagery may be an RGB file or may contain any number of bands (i.e. HSI). The result will be a point cloud with new fields containing the HSI data and a raster containing the DEM made from the cloud. This .tif file is registered to the HSI file (having the same CRS, image size, pixel size and pixel posting). Download from Nicolas Cadieux's GitLab
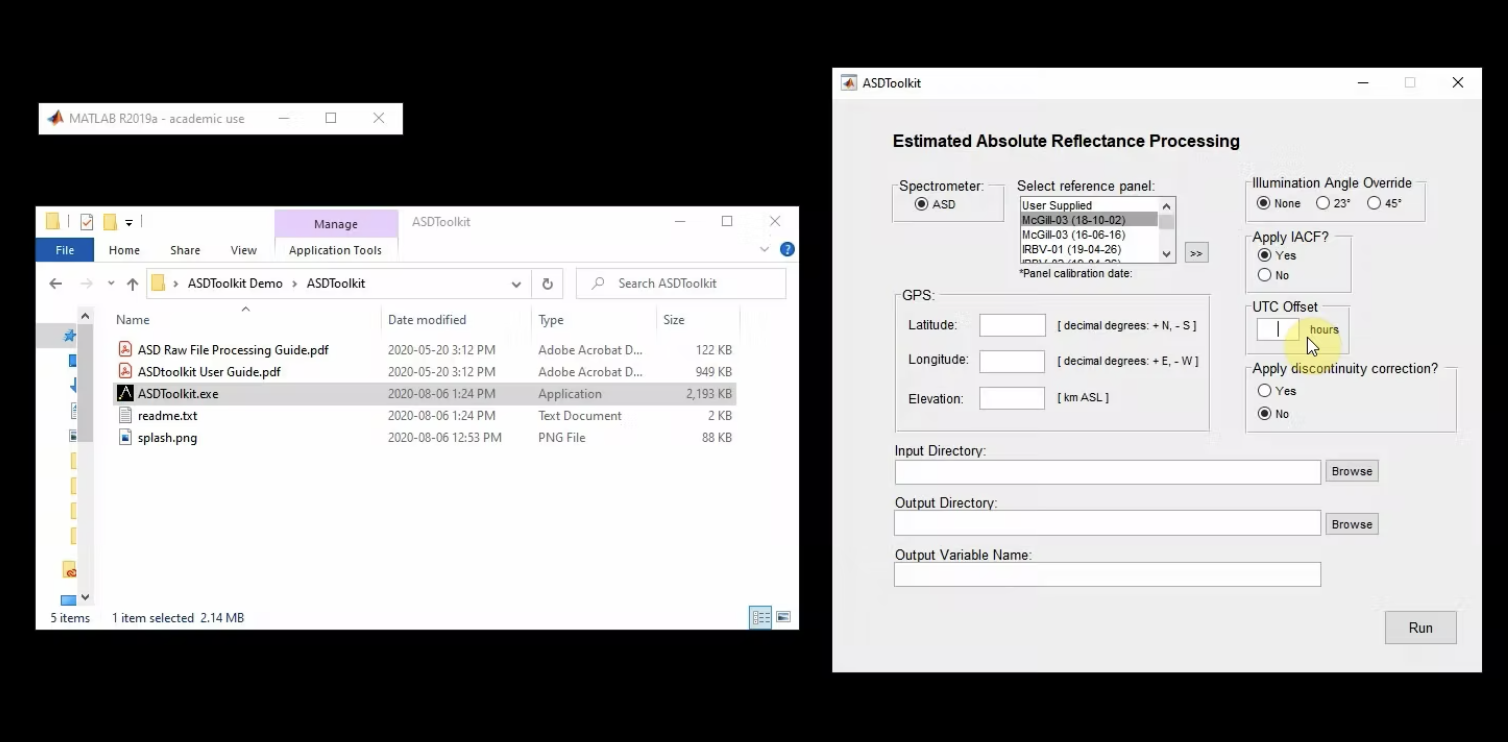
ASDToolkit: A Novel MATLAB Processing Toolbox for ASD Field Spectroscopy Data
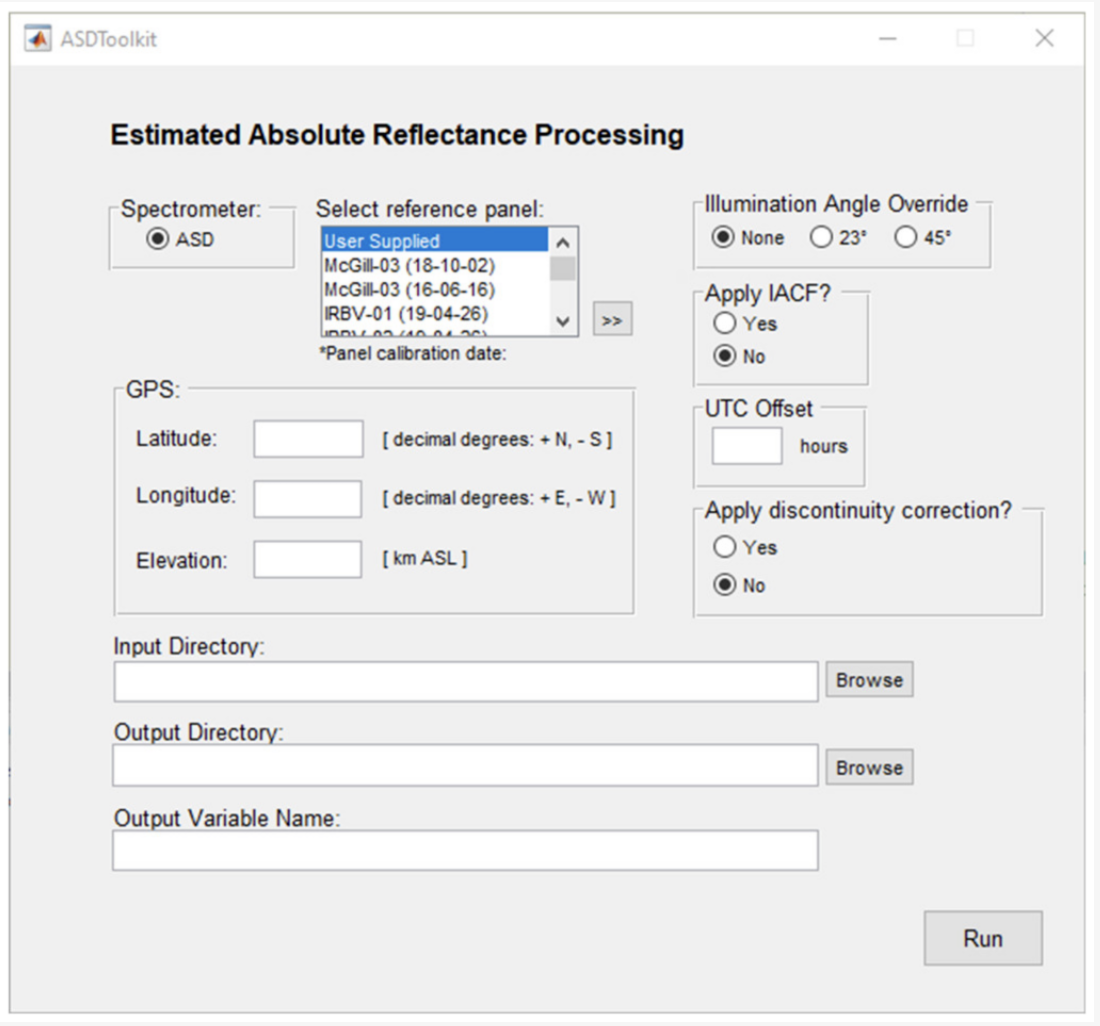
Windows executable toolbox (based on MATLAB) to calculate the the estimated absolute reflectance (Rabs) of targets from Analytical Spectral Devices (ASD) spectroradiometers. As opposed to the reflectance ratio commonly seen used in the literature, Rabs is independent of illumination intensity or conditions, and is the metric commonly suggested to be used to compare spectra even when data are collected by different sensors or acquired under different conditions. See Elmer et al. 2020 for details. The toolkit can be downloaded here. The video below illustrates the use of the toolkit.
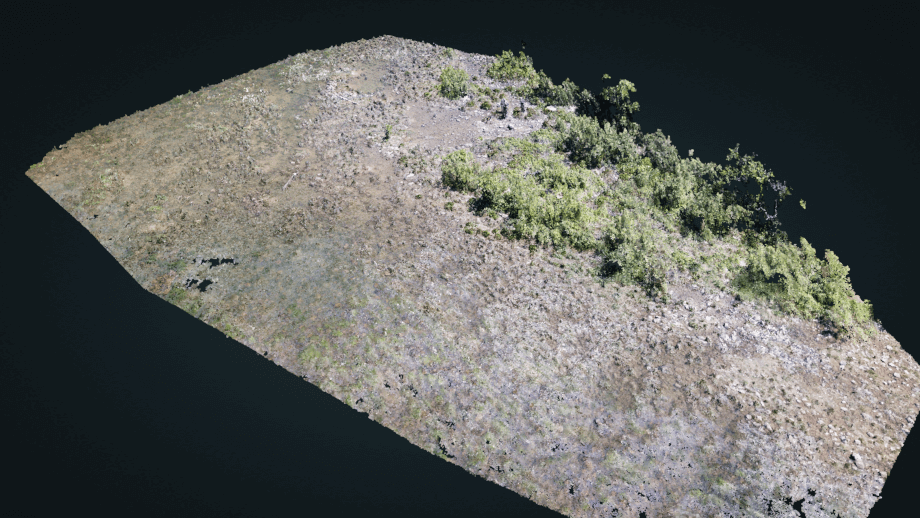
The online interactive models below are hosted through Potree. For the best viewing experience, a computer with an external mouse is recommended but tablets and smartphones with a modern processor and reliable internet connection will also work.
We are in the process of converting all 3D models to the .ply virtual reality (VR) headset compliant format - check back soon as we update the interactive models below. The VR label indicates the ones that have already been converted. The models hosted on Sketchfab can be viewed in VR on smartphones via the web link using a Google Cardboard compliant viewer. If using the Sktechfab iOS or Android application on a smartphone directly, the models can also be displayed in Augmented Reality (AR). See Kalacska et al. 2021 for a discussion of the two approaches.
Models that have have been converted to .ply can be viewed and interacted with using an Oculus Quest 2 (or similar) VR headset. Click on the button below for instructions on how to view the models with an Oculus Quest 2. Steps are similar for other headsets such as the HTC Vive.
Augmented Reality via Sketchfab app
On a smartphone, open the Sketchfab app, search for Applied Remote Sensing Lab and click on the models available to be viewed in AR.
Virtual Reality via Oculus Quest 2
In order to interact with the 3D models on the Oculus Quest 2 head set, you will also need a VR-Ready PC and an Oculus Link cable (or similar high quality USB C - USB 3 cable). Download and install:
- Oculus software: https://www.oculus.com/accessories/oculus-link/
- Steam and Steam VR: https://store.steampowered.com/app/250820/SteamVR/
- VRifier (this is installed within Steam VR): https://store.steampowered.com/app/640080/Vrifier/
Connect the Oculus Quest 2 to the PC via the link cable and follow the instructions in the video below.


Alto Curua waterfall, Brazil
Rio Formoso tributary, Bonito, Brazil
Hydrolycus skull
Iriri rapids high altitude, Brazil
Olho d'agua, Bonito, Brazil



Station de biologie des Laurentides - SfM
Station de biologie des Laurentides - UAV LiDAR
Cowichan Garry Oak Preserve - 2018

Cowichan Garry Oak Preserve - 2018
Applied Remote Sensing Lab
Department of Geography
McGill University
805 Sherbrooke West
Burnside Hall 305
Montreal, QC H3A 0B9
Canada
Project
About Us
Newsletter
Coming soon!
